NVIDIAはCVPRで、自動運転、ロボット、ビジョンAIの研究開発を加速するPhysical AI向けの「agent skills」を発表した。実世界のシーン再構成、合成シナリオ生成、方策学習、評価までのワークフローをAIエージェントでつなぐ狙いだ。
Physical AIの課題は、強いモデルを作ることだけではない。現実世界のデータを再構成し、希少な失敗ケースを作り、シミュレーションで検証し、行動を評価する一連の工程が分断されている点にある。
自動運転の「ロングテール」をどう再現するか
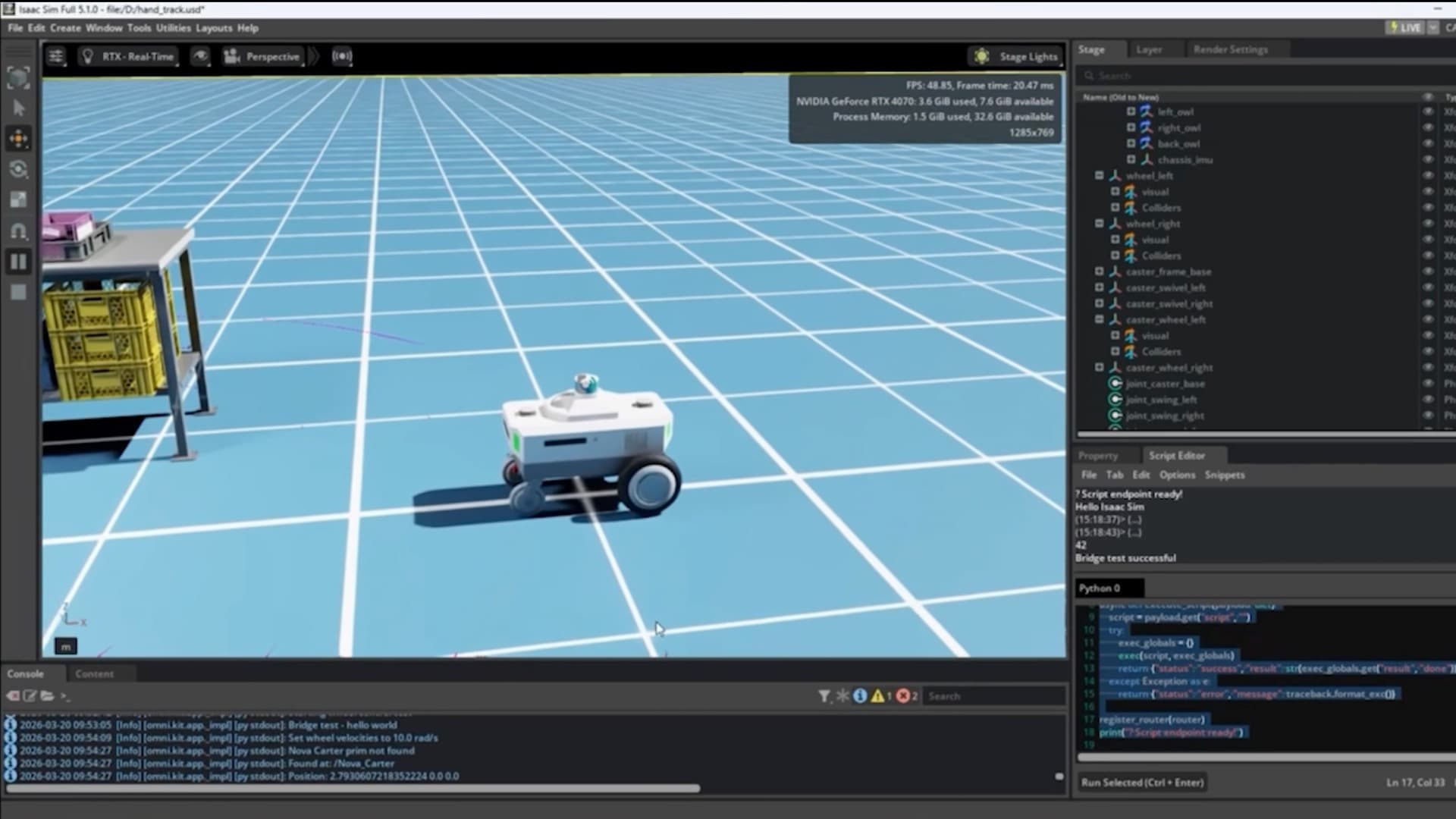
自動運転では、珍しい交通状況、特殊な道路形状、照明変化、予測しにくい行動など、実地走行だけでは集めにくいケースが安全性の鍵になる。NVIDIAは、フリートデータから編集可能な3Dシーンを作り、合成データや新しい視点を生成するワークフローをAIエージェントで扱えるようにする。
発表では、Neural Reconstruction、Omniverse NuRec、InstantNuRec、Harmonizer、HiGSなどの技術に触れ、再現可能なシミュレーションで条件を変えながら失敗モードを見つける重要性が説明されている。
工程 | 従来の課題 | agent skillsの狙い |
|---|---|---|
シーン再構成 | 現実データを再利用しにくい | 編集可能な3D環境へ変換 |
合成データ | 希少ケースを集めにくい | 条件を変えたシナリオを生成 |
評価 | ツールが分断され反復が遅い | 学習・シミュレーション・評価を接続 |
Cosmos 3と組み合わせた研究基盤
NVIDIAは同週、Physical AI向けのオープンなフロンティア基盤モデル「Cosmos 3」も発表している。ブログでは、Physical AI skillsがCosmos、NVIDIAライブラリ、シミュレーションフレームワークと組み合わさり、研究者がモデル能力からエンドツーエンドの実験ワークフローへ進みやすくなると説明されている。
さらに、NVIDIA AlpaGym、OmniDreams、Alpamayo 2 Superなど、自動運転研究のための強化学習、生成世界モデル、視覚言語行動モデルにも言及している。重要なのは、個別モデルの発表ではなく、実験を回すための基盤が整いつつある点だ。
日本企業への示唆
製造、物流、建設、モビリティなど、日本企業が強い産業では、AIがデジタル空間だけでなく現場の機械や設備へ入っていく。そこで必要になるのは、単体の認識モデルではなく、現場データ、シミュレーション、評価、改善をつなぐ開発プロセスだ。
Physical AIは導入コストも検証責任も大きい。だからこそ、希少ケースを安全に再現し、実機投入前に評価する仕組みが競争力になる。NVIDIAのagent skillsは、ロボット・自動運転開発が「モデルを作る」段階から「実験を高速に回す」段階へ移ることを示している。
参考:NVIDIA Blog
.png&w=384&q=75)