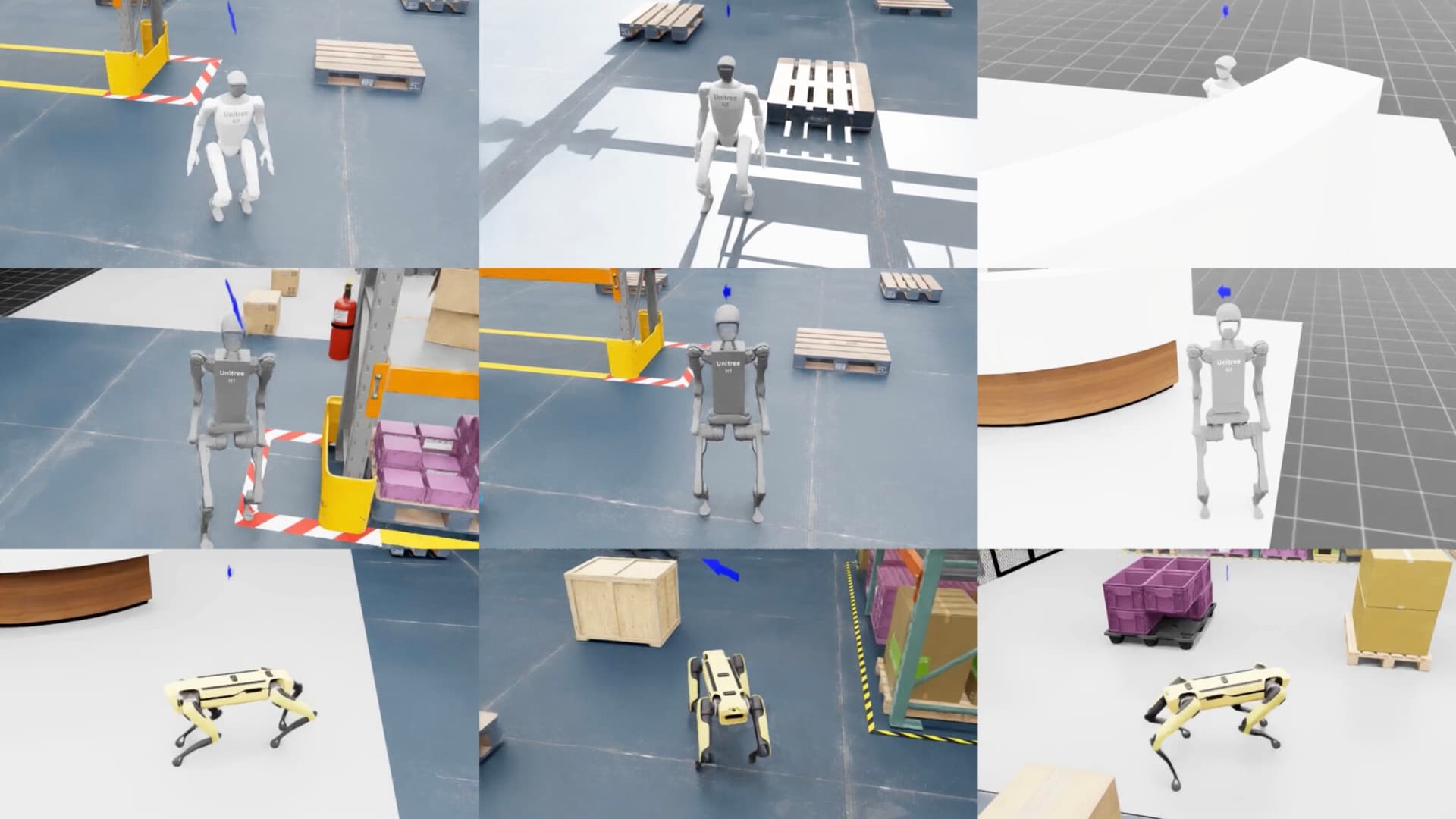
NVIDIA Researchは、ロボティクス国際会議ICRAに採択された研究のうち、simulation-to-real(sim-to-real)に関わる8本の論文を紹介した。ロボットをシミュレーションで学習・検証し、現実環境へ移すための技術群だ。
発表では、複数のロボットアームを並列に計画するScheduleStreamが、NVIDIA Jetson上のマルチアーム計画で3倍の高速化を示したと説明している。ロボットがラボのデモから、変化の多い現場で信頼して動く段階へ進むには、こうしたsim-to-realの成熟が欠かせない。
研究が扱う主な課題
課題 | 内容 | 産業応用の例 |
|---|---|---|
複数腕の協調 | 並列に動くアームの動作計画を高速化 | 製薬、組立、検査ライン |
身体の違いへの汎化 | 異なるロボット形状でも方策を使いやすくする | 倉庫、巡回、搬送 |
把持と組立 | 雑然とした環境で新しい物体を扱う | 物流、製造、リサイクル |
視覚・言語・行動 | 動く前に状況を理解し推論する | 人と同じ空間で働くロボット |
なぜビジネスにも重要か
Physical AIの導入では、現場にロボットを置くだけでは不十分だ。照明、床面、作業者の動き、異常停止、通信遅延など、現実世界の揺らぎに対応できるかが成果を左右する。sim-to-realは、現場投入前に失敗パターンを大量に試し、安全性と生産性を高めるための基盤になる。
日本企業では、製造・物流・医療・農業などで人手不足が深刻化している。ロボット導入の成否は、ハードウェア単体の性能だけでなく、シミュレーション、データ収集、現場改善を継続する体制にかかっている。
注意点
研究成果は有望だが、実環境では安全規格、保守、責任分界、作業者教育が必要になる。シミュレーションの成功をそのまま本番成果とみなさず、限定された現場で段階的に検証するべきだ。
参考:NVIDIA公式ブログ
.png&w=384&q=75)