NVIDIAは、ロボティクス研究開発を加速するため、オープンソースのNewton Physics EngineをNVIDIA Isaac Labで利用可能にし、ロボット向け基盤モデル「Isaac GR00T N1.6」やCosmos world foundation modelsの更新を発表した。狙いは、シミュレーションで学んだスキルを安全かつ再現性高く実機へ移すことだ。
AIエージェントの関心がソフトウェアから現実世界へ広がる中、Physical AIは次の重要テーマになりつつある。今回の発表は、ロボットの「頭脳」「身体シミュレーション」「訓練環境」を一体で整える動きとして注目できる。
Newtonはロボットの身体をより正確に試す
Newtonは、Google DeepMind、Disney Research、NVIDIAが共同開発し、Linux Foundationが管理するオープンソースのGPUアクセラレーテッド物理エンジンだ。NVIDIA WarpとOpenUSDを基盤に、複雑なロボット動作をシミュレーションする。
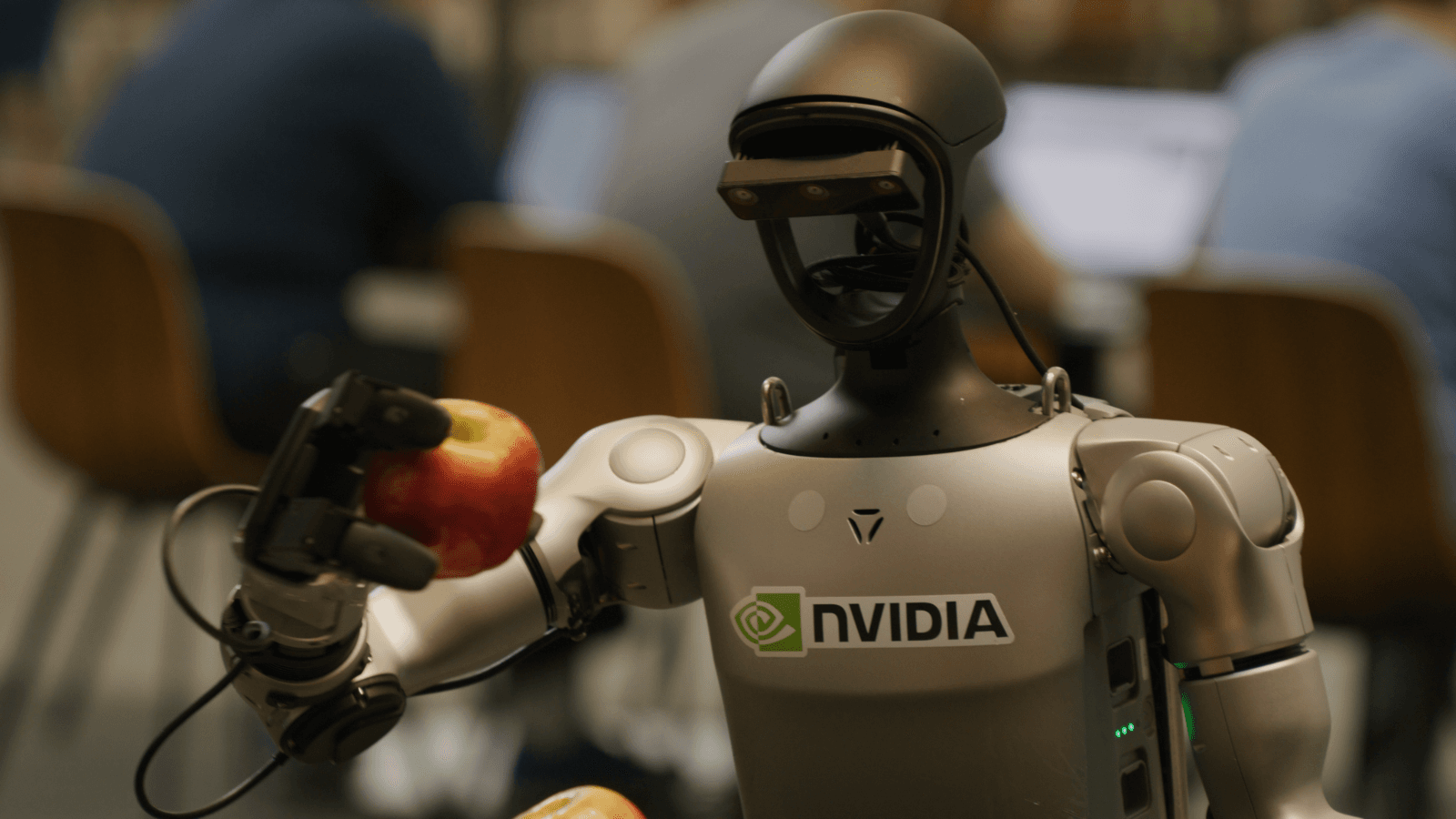
NVIDIAは、ヒューマノイドロボットのように関節、バランス、接触が複雑な対象では、従来の物理エンジンに限界があると説明する。Newtonは、雪や砂利の上を歩く、カップや果物を扱うといった複雑な動作を、実機に移しやすい形で試すことを目指す。
要素 | 役割 | 意味 |
|---|---|---|
Isaac GR00T N1.6 | 推論・視覚・行動モデル | 曖昧な指示を分解し、常識を使ってロボット技能を実行する |
Newton Physics Engine | 物理シミュレーション | ロボットの身体と環境の相互作用をより正確に試す |
Omniverse | 訓練環境 | 大規模な仮想世界で学習と検証を回す |
Cosmos | 世界基盤モデル | 多様な訓練データ生成と推論を支援する |
大学・企業が採用するロボティクス基盤へ
発表では、Stanford University、ETH Zurich、National University of Singaporeなどの研究者がNVIDIAのアクセラレーテッドコンピューティングとソフトウェアを活用しているとされた。さらに、Agility Robotics、Boston Dynamics、Disney Research、Figure AI、Franka Robotics、Hexagon、Skild AI、Solomon、Techman RobotなどがIsaacやOmniverse技術を採用している。
Newtonの採用例としては、ETH Zurich Robotic Systems Lab、Technical University of Munich、Peking University、Lightwheel、Style3Dなども挙げられている。研究機関と商用ロボット企業の双方を巻き込むことで、NVIDIAはPhysical AIの標準的な開発基盤を狙っている。
日本企業は「現場導入前の検証」に注目したい
製造、物流、小売、介護、建設など、日本の現場にはロボット活用余地が大きい。ただし、現実世界での失敗はソフトウェアより高コストで、安全性の検証も難しい。シミュレーションで訓練し、条件を変えて試し、実機へ移す基盤は、導入リスクを下げる重要な部品になる。
短期的には、すぐに汎用ヒューマノイドが現場を置き換えるわけではない。むしろ、特定作業に絞ったロボットの訓練、検証、遠隔監視、データ生成の効率化から実用が進む可能性が高い。Physical AIは派手なデモだけでなく、シミュレーションと運用設計の積み上げで差がつく領域だ。
.png&w=384&q=75)