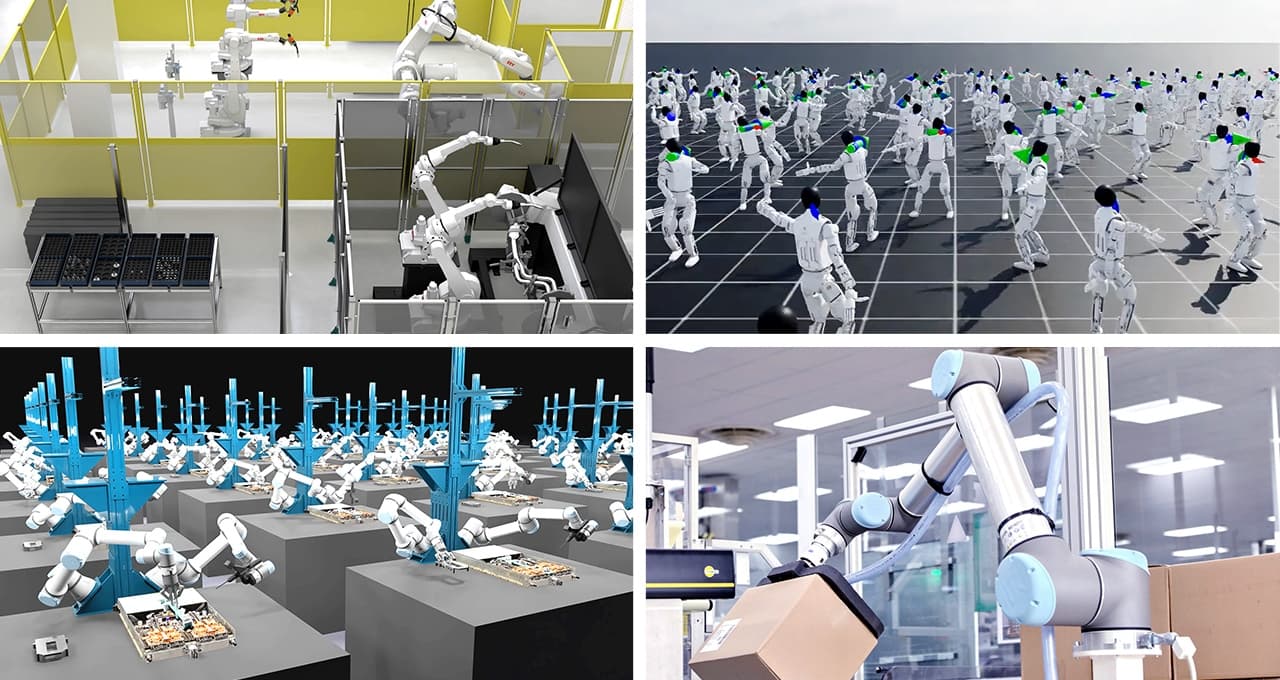
NVIDIAは、ABB Robotics、FANUC、Figure、KUKA、YASKAWAなどのロボティクス企業と連携し、Physical AIの実運用エコシステムを拡大すると発表した。新しいCosmos世界モデル、Isaacシミュレーションフレームワーク、Isaac GR00Tモデルも示している。
Physical AIは、現実世界を見て、理解し、計画し、動作するAIを指す。今回の発表は、産業ロボット、ヒューマノイド、医療・建設・物流向けロボットを、共通のシミュレーションとモデル基盤で開発する流れを強めるものだ。
発表で名前が挙がった領域
領域 | 関係企業・技術 | 狙い |
|---|---|---|
産業ロボット | ABB、FANUC、KUKA、YASKAWA | 仮想コミッショニングと現場検証の高度化 |
ヒューマノイド/ロボット頭脳 | Figure、Skild AI、World Labsなど | 汎用動作と環境理解の強化 |
シミュレーション | Omniverse、Isaac | 現場投入前に動作を検証する |
世界モデル | Cosmos、GR00T | 物理世界の理解と行動計画を支援 |
「あらゆる産業企業はロボティクス企業になる」──NVIDIA CEO Jensen Huang氏
日本企業への示唆
製造、物流、建設、医療の現場では、AIロボットを単体で買うだけでは成果につながりにくい。現場データ、シミュレーション、停止手順、保守、作業者との安全距離、責任分界を含む運用設計が必要になる。
一方で、主要ロボットメーカーが共通基盤に乗り始めれば、PoCの立ち上げは速くなる。日本企業にとっては、既存設備とデジタルツインをどう接続するか、ロボットの学習データをどう管理するかが競争力になりそうだ。
注意点
シミュレーションで成功した動作が現場でそのまま通用するとは限らない。照明、床面、人の動き、通信遅延、異常停止時の安全など、現実環境の揺らぎを前提に評価する必要がある。
参考:NVIDIA公式発表
.png&w=384&q=75)